周辺車両接近時サポートは、リヤバンパー上方の内側にある後側方レーダーセンサーを使用して至近距離の後方車両を検知し、運転者へ対処方法を提案するシステムです。
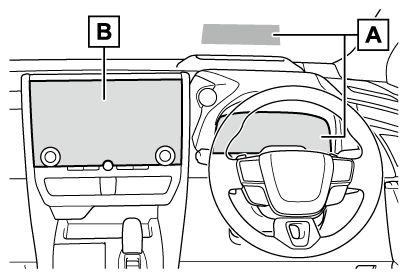
- マルチインフォメーションディスプレイ・ヘッドアップディスプレイ警察への通報またはヘルプネットへの接続を提案します。
- マルチメディアディスプレイ周辺車両接近時サポートのON /OFFを切りかえます。
![]() VELLFIRE HEV 取扱説明書
VELLFIRE HEV 取扱説明書
周辺車両接近時サポートは、リヤバンパー上方の内側にある後側方レーダーセンサーを使用して至近距離の後方車両を検知し、運転者へ対処方法を提案するシステムです。
安全運転を行う責任は運転者にあります。常に周囲の状況を把握し、安全運転に努めてください。
周辺車両接近時サポートは後方車両が至近距離まで接近したときの対処方法を運転者に提案する補助的なシステムです。
周辺車両接近時サポートを使用していても状況によっては本システムが有効に機能しないことがあるため、運転者は自らの目視による安全確認をおこなう必要があります。
システムを過信すると思わぬ事故につながり、重大な傷害におよぶか、最悪の場合死亡につながるおそれがあります。
周辺車両接近時サポートのON / OFF は、カスタマイズメニューから切りかえることができます。(→設定を変更するには)
大音量のオーディオや周辺環境などで大きな音がする場合、音声が聞こえづらくなる場合があります。
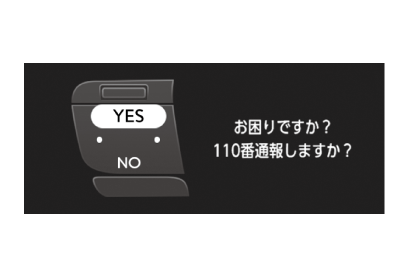
後方車両が至近距離まで接近したときに、マルチインフォメーションディスプレイまたはヘッドアップディスプレイと音声で下記の対処方法を提案します。
携帯電話をマルチメディアとハンズフリー接続しているときは、ハンズフリー電話での警察への通報を提案します。
通報する場合は、マルチインフォメーションディスプレイまたはヘッドアップディスプレイで“はい(YES)”を選択してください。
ハンズフリー電話の詳細については、別冊「マルチメディア取扱書」を参照してください。
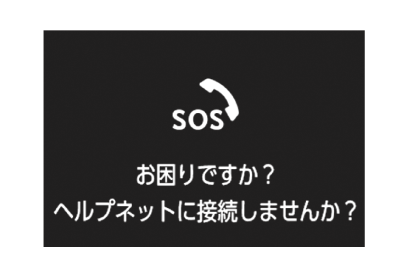
ヘルプネットを契約しているときは、ヘルプネットセンターへの通報を提案します。
通報する場合は、ヘルプネットボタンを押してください。
ヘルプネットの詳細については、別冊「マルチメディア取扱書」を参照してください。
周辺車両接近時サポートは、次の条件をすべて満たしているときに作動します。
パワースイッチがON のとき
周辺車両接近時サポートがON のとき
シフトポジションがR 以外のとき
車速が約60km/h 以上のとき
方向指示レバーを操作していないとき
ブレーキペダルを踏んでいないとき
前回作動から約10 分以上経過していること
通報提案は、次の条件をすべて満たしているときに作動します。
携帯電話がマルチメディアとBluetooth® でハンズフリー接続されているとき
Bluetooth® ワードマークおよびロゴは登録商標であり、Bluetooth SIG, Inc. が所有権を有します。
携帯電話の電波が圏外でないとき
携帯電話が着信中、発信中、通話中でないとき
通報提案がされていないとき
ヘルプネットの契約がされている
周辺車両接近時サポートは、同じ車線を走行する後方車両が至近距離にいる状態が続いた状況のとき、検知範囲に入った車両を検知します。
周辺車両接近時サポートは、次のような車両や車両以外のものを検知対象としません。
小型のオートバイ・自転車・歩行者など![]()
ガードレール・壁・標識・駐車車両などの静止物![]()
対向車
隣の車線を走行する他車![]()
状況によっては検知をすることがあります。
次のような状況では後方車両を正しく検知しないおそれがあります。
センサーやセンサー周辺への強い衝撃などにより、センサーの位置や向きがずれているとき
泥・雪・氷・ステッカーなどがセンサーやセンサー周辺のリヤバンパー上方に付着したとき
大雨・雪・霧などの悪天候時、水たまりなどの濡れた路面を走行するとき
急勾配の上り・下りが連続した坂道や道路のくぼみ等を走行しているとき
けん引しているとき
後方車両と自車の中心がずれているとき
斜め後方から車両が近付いてくるとき
自車の後方に他車が急に割り込んできたとき
他車の前方に割り込んだとき
後方車両の周辺に他車が存在するとき
後方車両の周辺にガードレールや壁などの静止物があるとき
きついカーブや連続したカーブ、起伏がある場所を走行するとき
後続車の高さが自車と違いがありすぎるとき
特に次のような状況では、後続車の接近がなくてもシステムが作動するおそれがあります。
センサーやセンサー周辺への強い衝撃などにより、センサーの位置や向きがずれているとき
けん引しているとき
自車の周辺に複数台の他車が存在するとき
自車が右左折するときに後続車が自車の真後ろを通過したとき
後方車両が近距離から自車を追い越したとき
車線の幅が狭い、もしくは車線の端を走行するなど、隣の車線を走行する車両が検知範囲に入ったとき
後方車両の周辺に複数の車両が存在するとき
道路上方に物体(道路標識や看板など)がある場所を走行するとき
後方車両の周辺にガードレールや壁などの静止物があるとき
カーブ中に隣接車両がいるとき
他車の前方に割り込んだとき
合わせて見られているページ