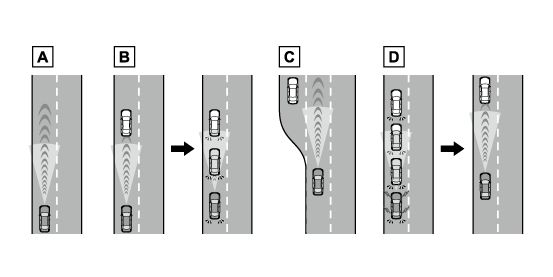
車両前方の先行車の有無・先行車との車間距離を判定して、先行車との適切な車間距離を確保する制御をします。また、車間距離切りかえスイッチを操作して、希望の車間距離に設定することもできます。
高速道路や自動車専用道路で使用してください。
![]() GR YARIS 取扱説明書
GR YARIS 取扱説明書
グレード、オプションなどにより、装備の有無があります。
車両前方の先行車の有無・先行車との車間距離を判定して、先行車との適切な車間距離を確保する制御をします。また、車間距離切りかえスイッチを操作して、希望の車間距離に設定することもできます。
高速道路や自動車専用道路で使用してください。
安全運転を行う責任は運転者にあります。システムを過信せず、運転者は常に自らの責任で周囲の状況を把握し、安全運転に努めてください。
レーダークルーズコントロールは運転者の操作の一部を支援し、操作負担を軽減するためのシステムで、支援の範囲には限りがあります。
次の項目をお読みいただき、システムを過信せず安全運転に努めてください。
システムが正しく作動しないおそれのある状況:→システムが正しく作動しないおそれのある状況
設定速度は、制限速度・交通の流れ・路面環境・天候などを考慮して適切に設定してください。設定速度の確認は、運転者が行う必要があります。
システムが正常に機能していても、運転者が認識している先行車の状況とシステムが検知している状況が異なる場合があります。従って注意義務・危険性の判断・安全の確保は運転者が行う必要があります。システムに頼ったり、安全を委ねる運転をしたりすると思わぬ事故につながり、重大な傷害におよぶか、最悪の場合死亡につながるおそれがあります。
システムの支援には限界があるため、次の点に注意してください。システムを過信すると思わぬ事故につながり、重大な傷害におよぶか、最悪の場合死亡につながるおそれがあります。
運転者が見る過程での支援内容
レーダークルーズコントロールは、自車と設定された先行車との車間距離を検知するのみであり、わき見やぼんやり運転を許容するシステムでも、視界不良を補助するシステムでもありません。
走行中に限らず、運転者自らが周囲の状況に注意を払う必要があります。
運転者が判断する過程での支援内容
レーダークルーズコントロールは、自車と設定された先行車との車間距離が適正かどうかを判断しており、それ以外の判断はしません。このため、危険性があるかどうかなど運転者は自ら安全の判断をする必要があります。
運転者が操作する過程での支援内容
レーダークルーズコントロールは、先行車への追突を防止する機能はありません。このため、危険性があれば運転者自らが安全を確保する必要があります。
次の状況では、レーダークルーズコントロールを使用しないでください。適切な制御が行われず、思わぬ事故につながり、重大な傷害におよぶか、最悪の場合死亡につながるおそれがあります。
歩行者や自転車等が混在している道
高速道路や自動車専用道路の出入り口
接近警報がひんぱんに鳴るとき
センサーが正しく作動しないおそれがあるとき:→センサーが正しく作動しないおそれがあるとき
システムをOFFにする必要があるとき:→システムをOFFにする必要があるとき

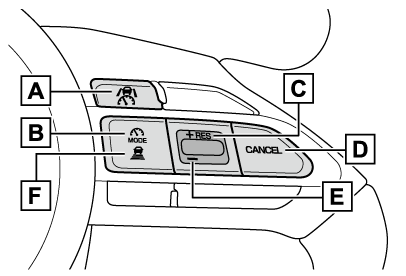
スイッチで設定速度をかえる
設定速度をかえるには、希望の速度が表示されるまで“+”スイッチまたは“-”スイッチを押します。
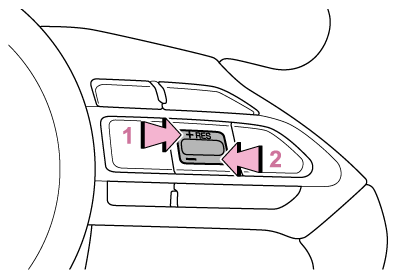
設定速度は、次のとおりに増減されます:
短押し調整:スイッチを操作をするごとに1km/h
長押し調整:スイッチを押し続けているあいだ、5km/hずつ
カスタマイズメニューから、設定速度の変化量を変更することができます。
アクセルペダルで設定速度を上げる
スイッチを押すごとに次のように車間距離を切りかえます。
先行車がいる場合、先行車マーク も表示されます。
も表示されます。
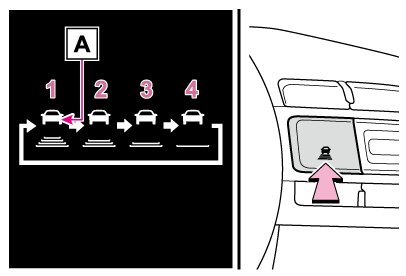
イラスト番号 | 車間距離 | 距離の目安(車速100km/hの場合) |
|---|---|---|
1 | 最長 | 約70m |
2 | 長 | 約60m |
3 | 中 | 約45m |
4 | 短 | 約30m |
車速に応じて実際の車間距離は増減します。また、制御停車時は設定にかかわらず状況に応じた車間距離で停車します。
シフトレバーがDのとき設定できます。
車速が約30km/h以上のとき、希望の設定速度に設定できます。
車速が約30km/h未満のときに設定すると、約30km/hに設定されます。
車速がシステムの上限を超えているときに設定すると、設定速度の上限に設定されます。
通常走行と同様にアクセルペダル操作で加速できます。加速後、車速が設定速度にもどります。ただし、車間制御モード時は先行車との距離を保持するため車速が設定速度以下になることもあります。
次のとき、自動的に車間制御モードが解除されます。
車両が停止したとき
運転支援装置によるブレーキ制御、出力抑制が作動したとき(例:プリクラッシュセーフティ、ドライブスタートコントロール)
パーキングブレーキが作動したとき
システムの一部もしくは全てが作動しないとき:→システムの一部もしくは全てが作動しないとき
安全にお使いいただくために:→安全にお使いいただくために
次のような場合にシステムによる減速が不十分な場合はブレーキペダルを、加速が必要な場合はアクセルペダルを、状況に応じて操作してください。
センサーが正しく車両を検知できず、接近警報(→接近警報)も作動しないおそれがあります。
割込み車両、離脱車両の車線変更が極端に速い、または遅いとき
自車が車線変更しているとき
先行車が低速で走行中のとき
同じ車線に停車中の車がいるとき
同じ車線を二輪車が走行中のとき
次の状況では、必要に応じてブレーキペダルで減速(場合によってアクセルペダルを操作)してください。
センサーが正常に車両を検知できず、システムが正常に作動しないおそれがあります。
先行車が急ブレーキをかけたとき
渋滞時等、低速で車線変更したとき
追従走行中の他車の割り込みなど、十分な減速ができない状態で先行車に接近したときは、表示の点滅とブザーで運転者に注意をうながします。その場合は、ブレーキペダルを踏むなど適切な車間距離を確保してください。
車間距離が短くても、次のような場合は警報されないことがあります。
先行車と自車の車速が同じか先行車の方が速いとき
先行車が極端な低速走行をしているとき
速度を設定した直後
アクセルペダルを踏んだとき
カーブを認識すると車速の抑制を開始します。カーブが終了すると車速の抑制が終了します。
状況に応じて設定速度まで復帰します。
先行車に割り込まれる等で、追従走行が優先された場合も車速抑制は終了します。

次のような状況では、カーブ速度抑制機能が作動しない場合があります。
緩やかなカーブを走行しているとき
アクセルペダルを操作しているとき
極端に短いカーブを走行しているとき
約80km/h以上で走行中に追い越し車線側へ車線変更する場合、方向指示レバーの操作と連動して設定速度まで加速することで、追い越しを支援します。
約80km/h以上で走行中に自車より遅い車両の後方へ車線変更する場合、方向指示レバーの操作と連動して緩減速することで、車線変更を補助します。
レーダークルーズコントロールの設定は、カスタマイズ設定から変更することができます。(→ユーザーカスタマイズ機能一覧)
レーダークルーズコントロールの作動状態を示しています。
表示灯 | マルチインフォメーションディスプレイ表示 | 状態 | |
|---|---|---|---|
 白色 |  | 設定車間距離:灰色 | レーダークルーズコントロールOFF |
 緑色 |  | 設定車間距離:青色 設定速度:緑色 | 定速走行 |
緑色 |  | 設定車間距離:青色 設定速度:緑色 先行車:白色 | 追従走行 |
緑色 | 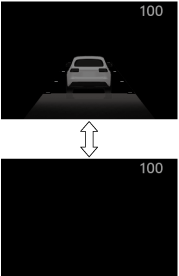 | 設定車間距離:橙色点滅 設定速度:緑色 先行車:橙色点滅 | 接近警報 |
緑色 | 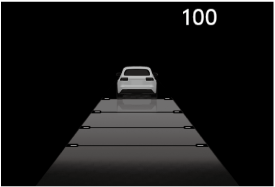 | 設定車間距離:灰色 設定速度:白色 先行車:灰色 | アクセルペダルによる加速中 |
緑色 |  | 設定速度:緑色反転表示 | 設定速度超過時 |